학습 개요
- 교착 상태의 필요 조건은 제거하지 못하는 경우도 있고 제거할 수는 있지만 자원 이용률이 낮아지는 경우도 있음
- 특히 환 형 대기 조건을 제거하는 방법은 적용에 어려움이 존재함
- 교착 상태를 처리하는 다른 기법
- 교착 상태 회피는 안전 순서 열이라는 개념을 이용하여 교착 상태를 피하는 방법임
- 교착 상태 탐지 및 복구는 교착 상태가 발생하면 사후 처리를 하는 방법임
- 교착 상태를 회피하는 방법을 자세히 알아보고, 교착 상태를 탐지 및 복구하는 방법에 대해서도 살펴봄
학습 목표
- 교착 상태를 회피하는 방법을 설명할 수 있음
- 교착 상태를 탐지하고 복구하는 방법을 설명할 수 있음
강의록
교착 상태 회피
교착 상태 회피
- 프로세스의 자원 사용에 대한 사전 정보를 활용하여 시스템이 교착 상태가 발생하지 않는 상태에 머물도록 하는 방법
- 사전 정보
- 현재 할당된 자원
- 가용 상태의 자원
- 각 프로세스들의 최대 자원 요구량
안전 상태와 안전 순서열
- 안전 상태
- 교착 상태가 발생하지 않음
- 교착 상태를 회피하면서 각 프로세스에 그들의 최대 요구량까지 빠짐 없이 자원을 할당할 수 있는 상태
- 안전 순서 열이 존재하는 경우
- 불안전 상태
- 안전 순서 열이 존재하지 않는 경우
- 불 안전 상태가 반드시 교착 상태를 의미하는 것은 아니지만 교착 상태로 이어질 가능성이 있는 상태임
안전 순서 열
- 순서 있는 프로세스의 집합 <p₁, p₂, …, pₙ>
- 각 pᵢ 에 대해, pᵢ 가 추가로 요구할 수 있는 자원의 양이 현재 가용 상태의 자원으로 충당되거나 혹은 여기에 pⱼ(단, j< i)에 할당 된 자원까지 포함하여 충당 가능한 경우
- 안전 순서 열이 존재하면 시스템은 안전 상태
- 시스템 상태
- 자원 r₁
- 단위 자원 8개
- 프로세스 p₁
- 프로세스가 종료될 때 까지 필요한 자원 최대 요구량 5개
- 프로세스 p₂
- 프로세스가 종료될 때 까지 필요한 자원 최대 요구량 2개
- 프로세스 p₃
- 프로세스가 종료될 때 까지 필요한 자원 최대 요구량 8개
- 자원 r₁
- 시각 T₁ 상태
- p₁ 단위 자원 할당 X, p₂ 단위 자원 할당 1개. p₃ 단위 자원 할당 5개, r₁ 가용 가능한 단위 자원 2개
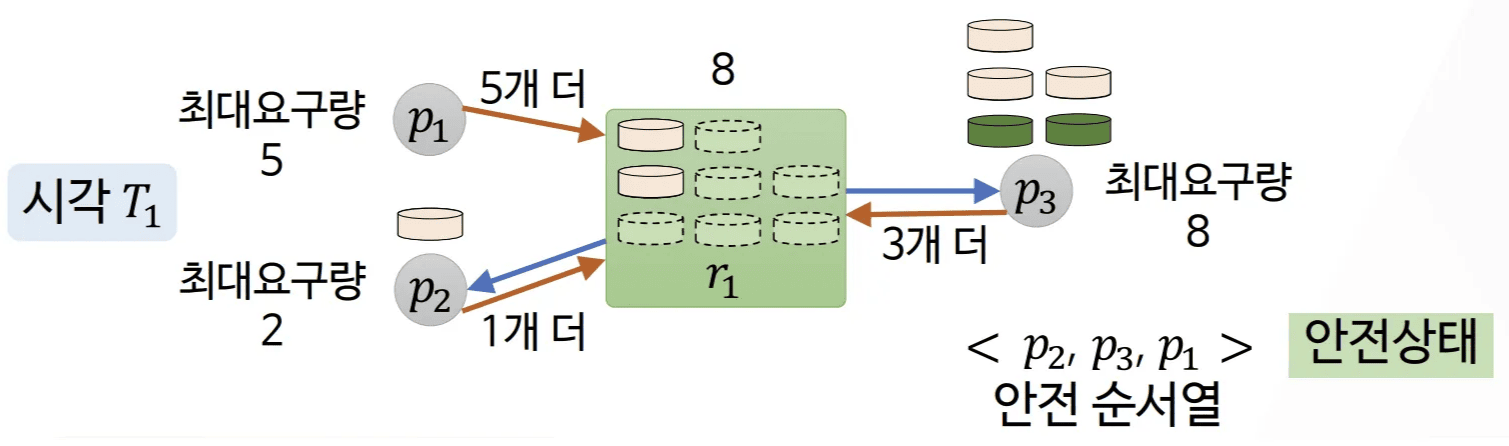
- p₁ 종료 되기 위해 단위 자원 5개 더 필요, p₂ 종료 되기 위해 단위 자원 1개 더 필요, p₃ 종료 되기 위해 단위 자원 3개 더 필요
- p₂에게 r₁의 가용 가능한 단위 자원 1개 할당 → 종료 후 2개 반환 → r₁ 가용 가능한 단위 자원 3개
- p₃에게 r₁의 가용 가능한 단위 자원 3개 할당 → 종료 후 8개 반환 → r₁ 가용 가능한 단위 자원 8개
- p₁에게 r₁의 가용 가능한 단위 자원 5개 할당
- 안전 순서 열 p₂ → p₃ → p₁
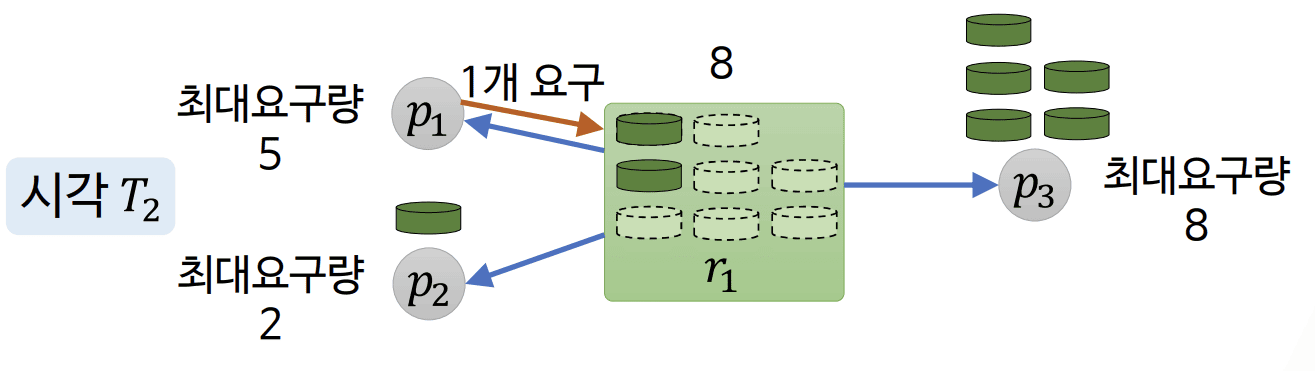
- 시각 T₂ 상태
-
p₁ 단위 자원 할당 X, p₂ 단위 자원 할당 1개. p₃ 단위 자원 할당 5개, r₁ 가용 가능한 단위 자원 2개
-
p₁ 단위 자원 1개 할당 요청 → r₁의 가용 가능한 단위 자원은 2개 이므로 1개 할당 → r₁ 가용 가능한 단위 자원 1개
- p₂에게 r₁의 가용 가능한 단위 자원 1개 할당 → 종료 후 2개 반환 → r₁ 가용 가능한 단위 자원 2개
- p₁ 이 필요한 자원은 4개, p₃는 3개지만 r₁의 가용 가능한 단위 자원 2개이므로 할당 불가능
-
안전 순서 열 p₂ → X → 불안전 상태
-
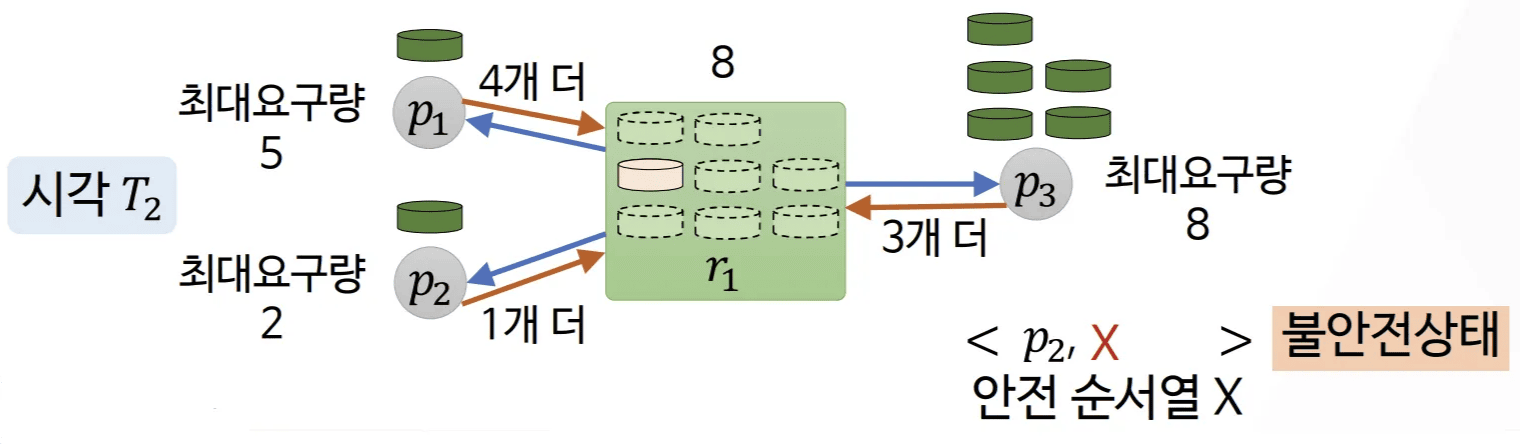
- 시각 T₂ 상태(교착 상태 회피)
-
p₁ 단위 자원 할당 X, p₂ 단위 자원 할당 1개. p₃ 단위 자원 할당 5개, r₁ 가용 가능한 단위 자원 2개
-
p₁ 단위 자원 1개 할당 요청 → r₁은 요구 간선 그대로 내버려 두고 할당하지 않음 → 그 후 안전 순서 열 계산
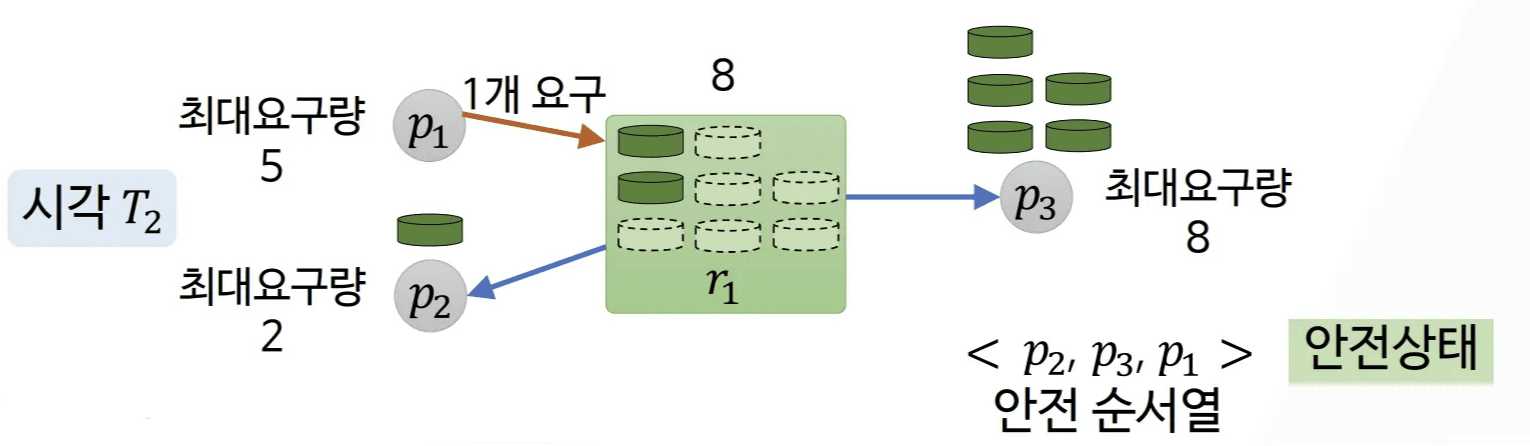
- p₁ 종료 되기 위해 단위 자원 5개 더 필요, p₂ 종료 되기 위해 단위 자원 1개 더 필요, p₃ 종료 되기 위해 단위 자원 3개 더 필요
- p₂에게 r₁의 가용 가능한 단위 자원 1개 할당 → 종료 후 2개 반환 → r₁ 가용 가능한 단위 자원 3개
- p₃에게 r₁의 가용 가능한 단위 자원 3개 할당 → 종료 후 8개 반환 → r₁ 가용 가능한 단위 자원 8개
- p₁에게 r₁의 가용 가능한 단위 자원 5개 할당
- 안전 순서 열 p₂ → p₃ → p₁
-
교착 상태 회피
- 교착 상태는 불안전 상태에서만 발생 가능
- 항상 안전 상태를 유지해야 함
- 프로세스가 가용 상태의 자원을 요구하더라도 프로세스는 대기 상태가 될 수 있음
- 자원 이용율은 다소 낮아질 수 있음
교착 상태 회피 알고리즘
- 각 자원의 단위 자원이 하나 밖에 없는 경우
- 변형 된 자원 할당 그래프 이용
- 각 자원의 단위 자원이 여러 개 일 수 있는 경우
- 은행원 알고리즘 이용
각 자원의 단위 자원이 하나 밖에 없는 경우
- 변형 된 자원 할당 그래프
- 자원 정점에 표시하던 단위 자원의 개수 제거
-
선언 간선 (pᵢ, rⱼ) 추가
- 앞으로 프로세스 pᵢ가 자원 rⱼ를 요구하게 될 것임
- 각각의 프로세스가 종료하기 위해 추가적으로 요청할 자원이 있음을 나타냄
-
요구 간선과 구분을 위해 점선으로 표시
- 앞으로 프로세스 pᵢ가 자원 rⱼ를 요구하게 될 것임
- 자원을 요구 받으면 해당 선언 간선을 요구 간선으로 변경
- 그 요구 간선을 할당 간선으로 변환해도 사이클이 생기지 않는 경우에만 자원을 할당하고 할당 간선으로 변환
-
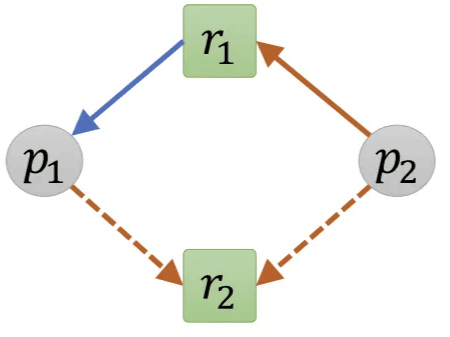
ex) p₁이 r₂를 요구하는 경우
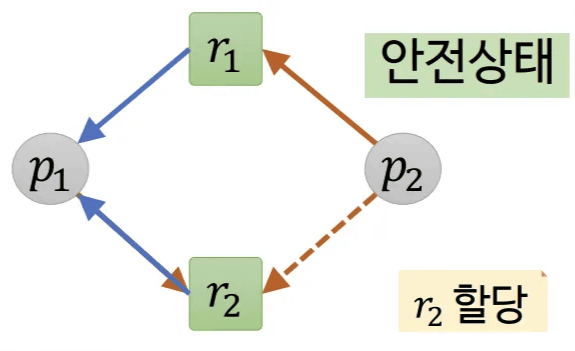
- 프로세스 p₁가 자원 r₂를 요청하면, 선언 간선 p₁ → r₂를 요청 간선 p₁ → r₂(실선)으로 변경함
- 이 요청 간선을 할당 간선 r₂ → p₁ 로 변환(즉, 자원을 할당)했을 때, 그래프에 사이클이 생기지 않는 경우에만 실제로 자원을 할당하고 할당 간선으로 변경함
- 사이클이 생긴다면, 자원을 할당하지 않고 프로세스는 대기함
- 불안전 상태 초래 가능성 방지
-
ex) p₂가 r₂를 요구하는 경우
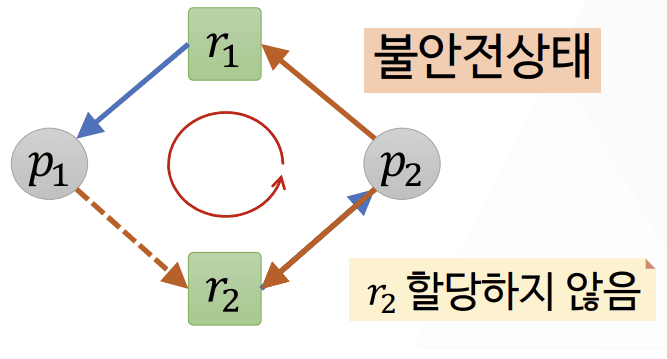
- 프로세스 p₂가 자원 r₂를 요청하면, 선언 간선 p₂ → r₂를 요청 간선 p₂ → r₂(실선)으로 변경함
- 이 요청 간선을 할당 간선 r₂ → p₂로 변환했을 때 그래프 상에서 사이클이 생기김
- 불안정 상태를 방지하기 위해 자원을 할당하지 않고 프로세스 대기
각 자원의 단위 자원이 여러 개 일 수 있는 경우
- 은행원 알고리즘
- 자원을 요구 받으면 그 자원을 할당해 주고 난 후의 상태를 계산해서 그것이 안전 상태인지 확인
- 안전 상태가 보장 되는 경우에만 자원을 할당
-
ex)
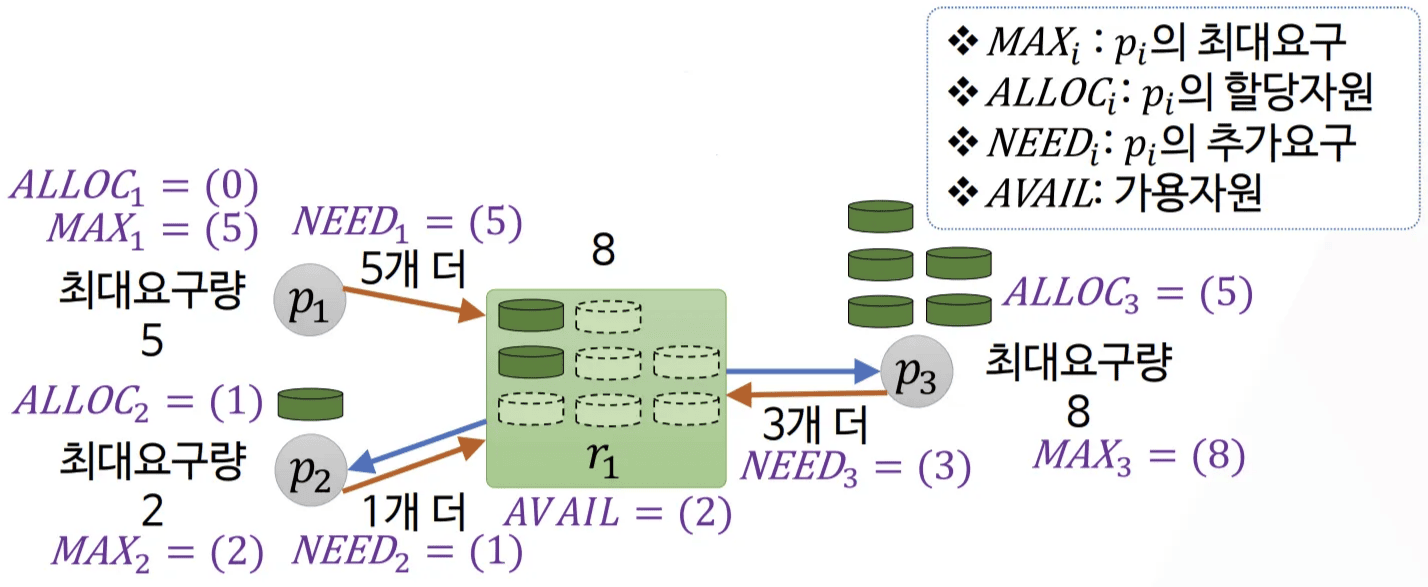
- p₁의 할당 자원 0, 최대 요구량 5, 추가 요구량 5
- p₂의 할당 자원 1, 최대 요구량 2, 추가 요구량 1
- p₃의 할당 자원 5, 최대 요구량 8, 추가 요구량 3
- r₁의 가용 자원 2
-
ex)
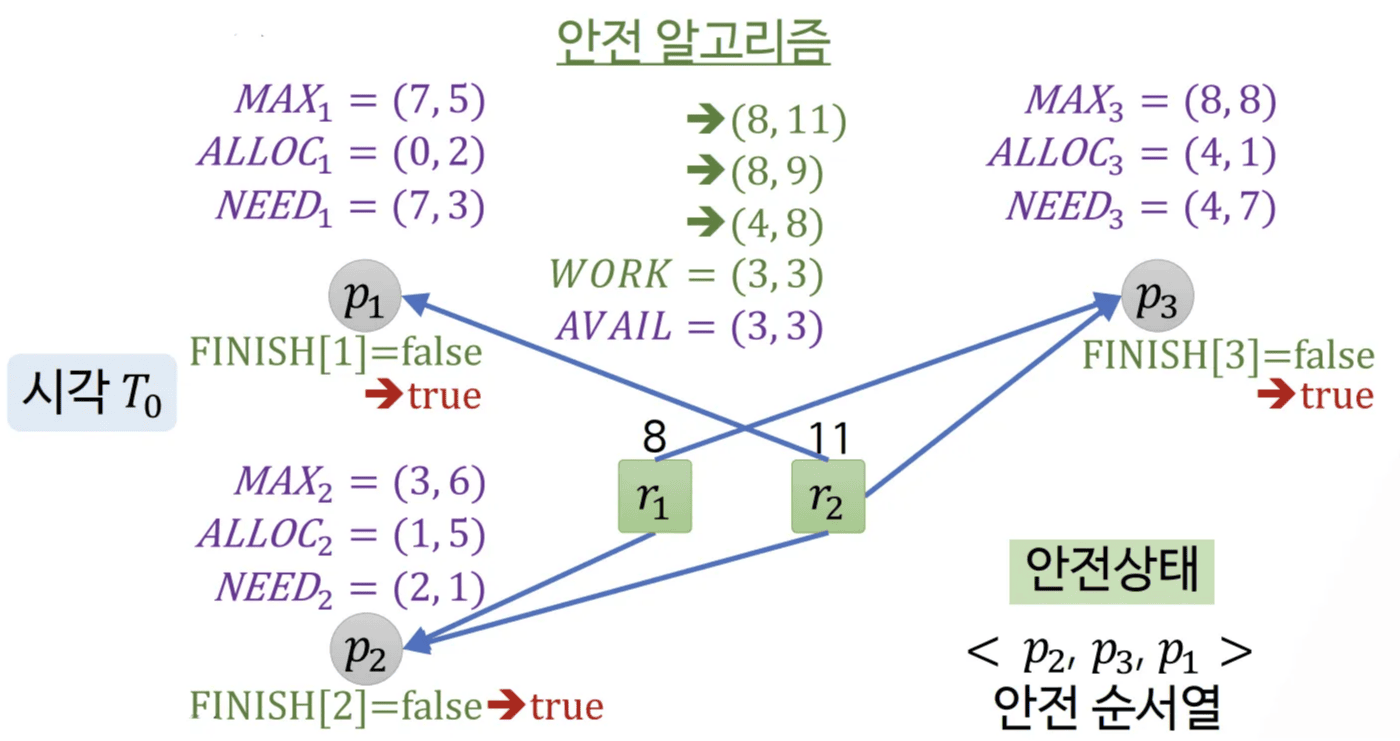
- p₁의 할당 자원 r₁ 0 ,r₂ 2, 최대 요구량 r₁ 7, r₂ 5, 추가 요구량 r₁ 7, r₂ 3
- p₂의 할당 자원 r₁ 1 ,r₂ 5, 최대 요구량 r₁ 3, r₂ 6, 추가 요구량 r₁ 1, r₂ 5
- p₃의 할당 자원 r₁ 4 ,r₂ 1, 최대 요구량 r₁ 8, r₂ 8, 추가 요구량 r₁ 4, r₂ 1
- r₁의 가용 자원 3, r₂의 가용 자원 3
- 새로운 변수 WORK 에 현재 상태에서 가용할 수 있는 자원 AVAIL 값 복사
- 각 프로세스마다 FINISH 값 false로 설정
- 프로세스가 종료되지 않았다는 의미
- WORK 값을 할당 해 NEED 값을 할당 할 수 있는 프로세스 체크
- p₂한테 자원 할당 후 p₂가 종료 된 후 반환 된 1, 5 값 WORK 값에 추가
- WORK 값 4, 8을 이용해 NEED 값 할당 할 수 있는 프로세스 체크
- p₃한테 자원 할당 후 p₃가 종료 된 후 반환 된 4, 1 값 WORK 값에 추가
- WORK 값 8, 8을 이용해 NEED 값 할당 할 수 있는 프로세스 체크
- p₁한테 자원 할당 후 p₁가 종료 된 후 반환 된 0, 2 값 WORK 값에 추가
- 모든 프로세스 상태 FINISH = true 이므로 안전 상태가 되므로 자원 할당해줌
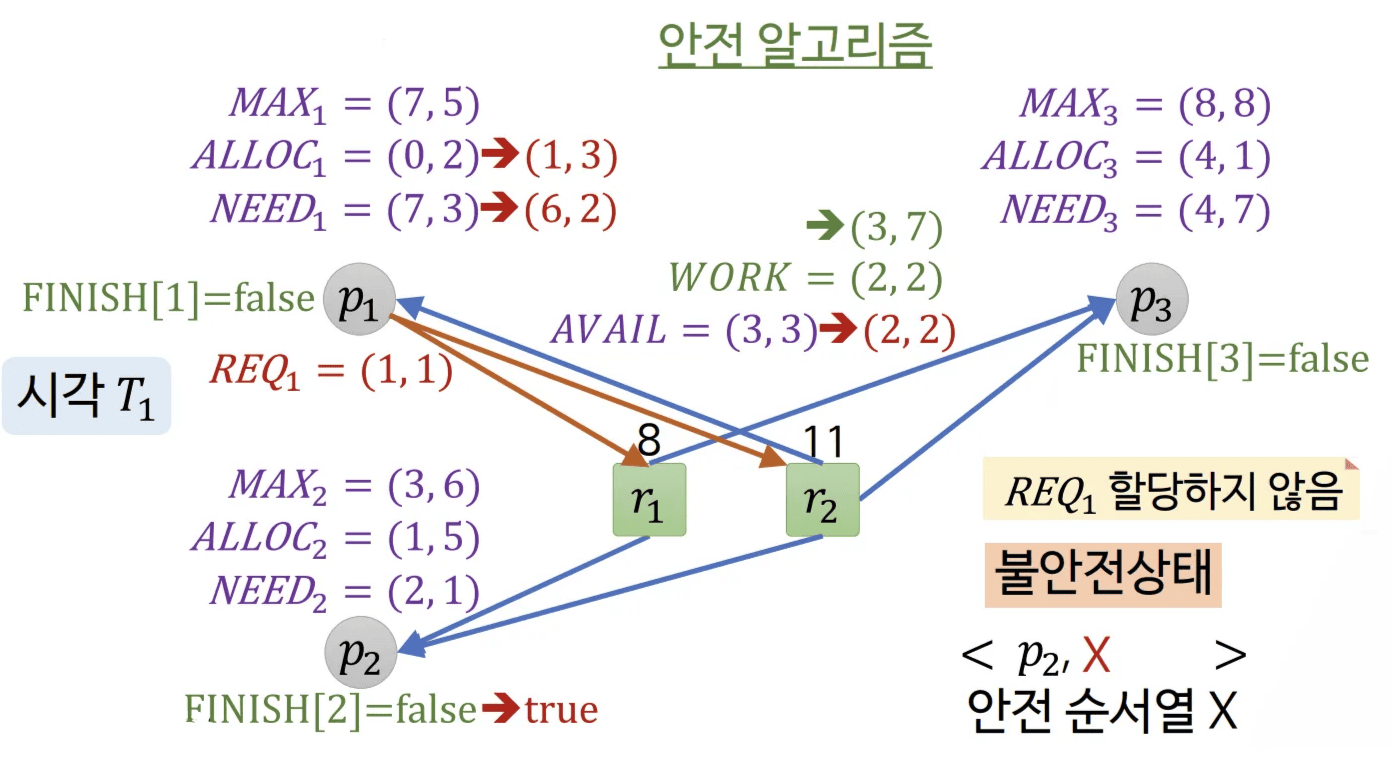
- p₁의 할당 자원 r₁ 0 ,r₂ 2, 최대 요구량 r₁ 7, r₂ 5, 추가 요구량 r₁ 7, r₂ 3
- p₂의 할당 자원 r₁ 1 ,r₂ 5, 최대 요구량 r₁ 3, r₂ 6, 추가 요구량 r₁ 1, r₂ 5
- p₃의 할당 자원 r₁ 4 ,r₂ 1, 최대 요구량 r₁ 8, r₂ 8, 추가 요구량 r₁ 4, r₂ 1
- r₁의 가용 자원 3, r₂의 가용 자원 3
- p₁이 단위 자원 r₁ 1 ,r₂ 1 요구함 → 바로 할당하지 않고 상태 계산 먼저 함
- ALLOC₁에 r₁ 1 ,r₂ 1 자원 할당 → NEED₁ r₁ 6, r₂ 4로 감소
- AVAIL r₁ 1 ,r₂ 1 감소 해 r₁ 2 ,r₂ 2로 저장
- 새로운 변수 WORK 에 현재 상태에서 가용할 수 있는 자원 AVAIL 값 복사
- 각 프로세스마다 FINISH 값 false로 설정
- 프로세스가 종료되지 않았다는 의미
- WORK 값을 할당 해 NEED 값을 할당 할 수 있는 프로세스 체크
- p₂한테 자원 할당 후 p₂가 종료 된 후 반환 된 1, 5 값 WORK 값에 추가
- WORK 값 3, 7을 이용해 NEED 값 할당 할 수 있는 프로세스 체크
- 할당 할 수 있는 프로세스 존재 하지 않음 → 불안전 상태
- REQ₁에 가용할 자원이 있지만 불안정 상태가 되기 때문에 자원을 할당하지 않음
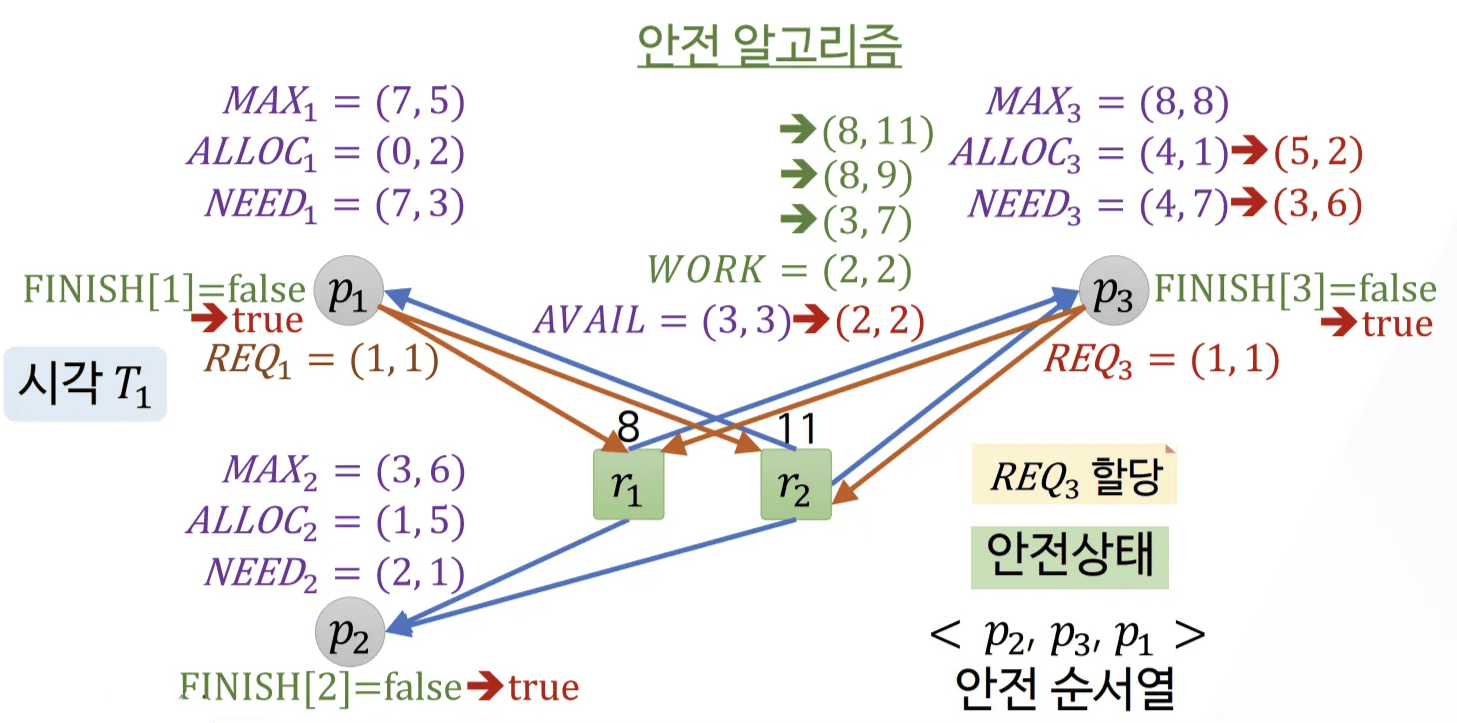
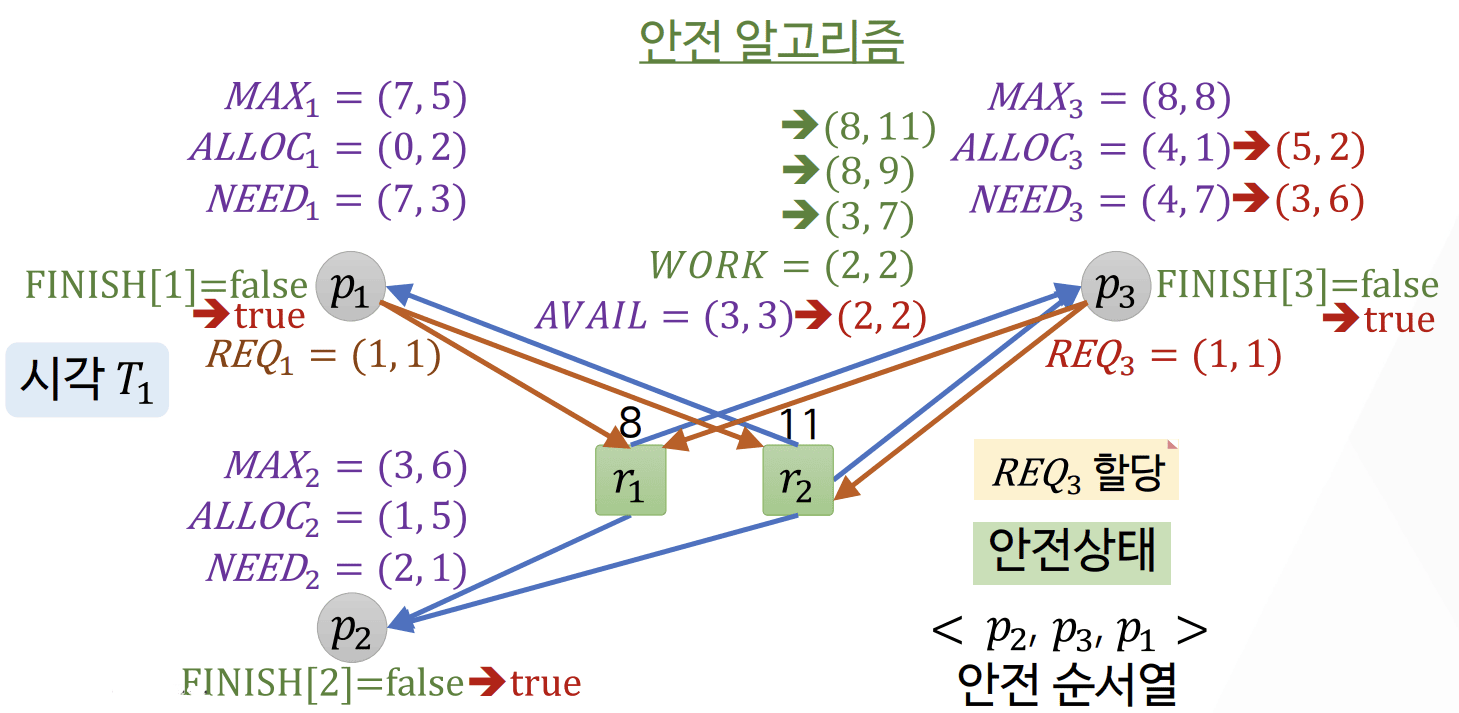
- p₁의 할당 자원 r₁ 0 ,r₂ 2, 최대 요구량 r₁ 7, r₂ 5, 추가 요구량 r₁ 7, r₂ 3
- p₂의 할당 자원 r₁ 1 ,r₂ 5, 최대 요구량 r₁ 3, r₂ 6, 추가 요구량 r₁ 1, r₂ 5
- p₃의 할당 자원 r₁ 4 ,r₂ 1, 최대 요구량 r₁ 8, r₂ 8, 추가 요구량 r₁ 4, r₂ 1
- r₁의 가용 자원 3, r₂의 가용 자원 3
- p₃이 단위 자원 r₁ 1 ,r₂ 1 요구함 → 바로 할당하지 않고 상태 계산 먼저 함
- ALLOC₁에 r₁ 1 ,r₂ 1 자원 할당 → NEED₁ r₁ 3, r₂ 6로 감소
- AVAIL r₁ 1 ,r₂ 1 감소 해 r₁ 2 ,r₂ 2로 저장
- 새로운 변수 WORK 에 현재 상태에서 가용할 수 있는 자원 AVAIL 값 복사
- 각 프로세스마다 FINISH 값 false로 설정
- 프로세스가 종료되지 않았다는 의미
- WORK 값을 할당 해 NEED 값을 할당 할 수 있는 프로세스 체크
- p₂한테 자원 할당 후 p₂가 종료 된 후 반환 된 1, 5 값 WORK 값에 추가
- WORK 값 3, 7을 이용해 NEED 값 할당 할 수 있는 프로세스 체크
- p₃한테 자원 할당 후 p₃가 종료 된 후 반환 된 5, 2 값 WORK 값에 추가
- WORK 값 8, 9을 이용해 NEED 값 할당 할 수 있는 프로세스 체크
- p₁한테 자원 할당 후 p₁가 종료 된 후 반환 된 0, 2 값 WORK 값에 추가
- 모든 프로세스 상태 FINISH = true 이므로 안전 상태가 됨
- 안전 순서열 p₂ → p₃ → p₁으로 안전 상태가 되므로 자원 할당해줌
은행원 알고리즘: 의사 코드
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
// 자원 요청 처리 함수 (pᵢ가 자원 REQᵢ를 요청)
void bank(REQᵢ) {
// 요청량 <= 최대 필요량 확인
if (!(REQᵢ <= NEEDᵢ)) { 오류 처리; }
// 요청량 <= 현재 가용량 확인
if (!(REQᵢ <= AVAIL)) { pᵢ 대기; }
// 할당 후와 같은 상태를 만듦
ALLOCᵢ = ALLOCᵢ + REQᵢ;
NEEDᵢ = NEEDᵢ - REQᵢ;
AVAIL = AVAIL - REQᵢ;
// 할당 후가 안전 상태인지 (안전성 알고리즘 호출)
status = safe(상태 데이터);
// 안전하면 실제 할당, 아니면 원상 복구 후 대기
if (status == true) {
REQᵢ 할당;
} else {
pᵢ 대기 및 상태 데이터 복구;
}
}
// 안전성 알고리즘 (현재 상태가 안전한지 검사)
boolean safe(상태 데이터) {
WORK = AVAIL; // 작업용 가용 자원 벡터
FINISH[i]=false;(i=1,2,…,n) // 각 프로세스 종료 여부 (n개)
for(l=1; l<=n; l++) {
for(i=1; i<=n; i++)
if(FINISH[i]==false && NEEDᵢ <= WORK ) {
WORK = WORK + ALLOCᵢ;
FINISH[i] = true;
break;
}
if (i > n) break;
}
// 모든 프로세스가 종료될 수 있으면(모든 FINISH[i]가 true) 안전상태
if (모든 i에 대해 FINISH[i] == true) {
return true;
} else {
return false; // 안전 순서열 찾기 실패 -> 불안전상태
}
}
교착 상태 탐지 및 복구
교착 상태 탐지 및 복구
- 사후에 처리하는 방법
- 교착 상태 탐지
- 시스템의 교착 상태 여부를 조사하기 위해 주기적으로 상태 조사 알고리즘 수행
- 교착 상태 복구
- 교착 상태가 탐지된 경우 적절한 조치를 취해 정상 상태로 복구
교착 상태 탐지
- Shoshani와 Coffman 알고리즘
- 현재 할당된 ALLOC 값과 REQ 값만 필요함
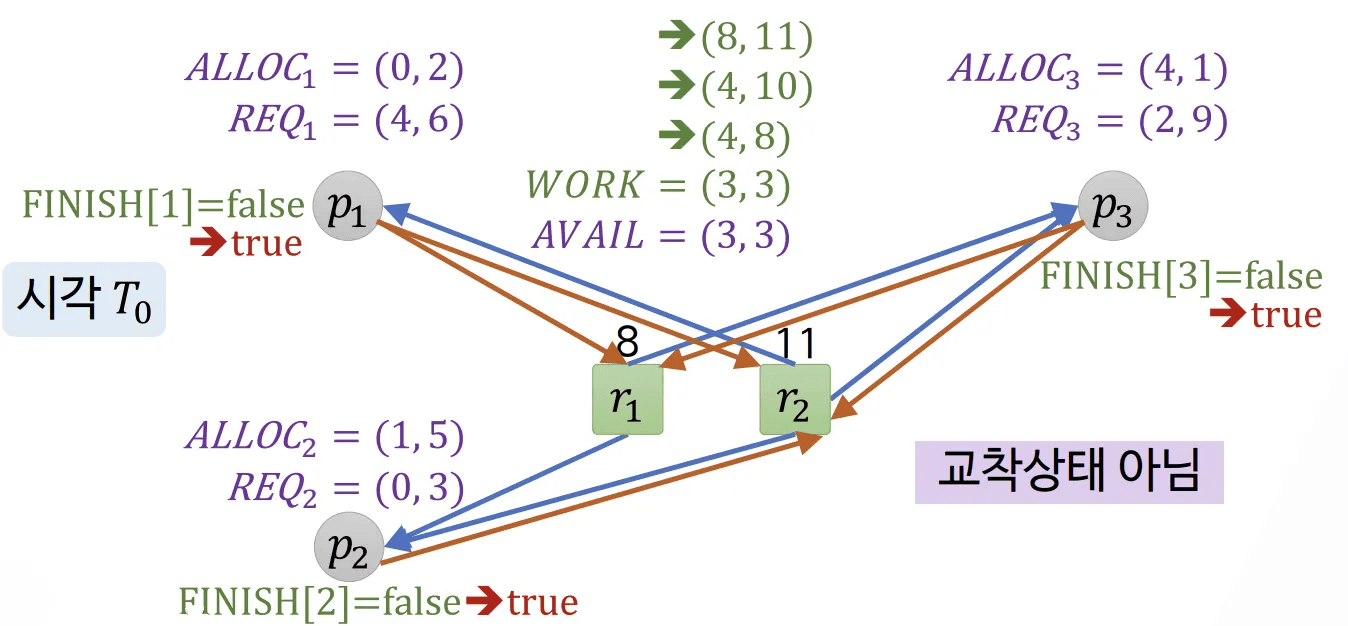
- p₁의 할당 자원 r₁ 0 ,r₂ 2, 요구 자원 r₁ 4, r₂ 6
- p₂의 할당 자원 r₁ 1 ,r₂ 5, 요구 자원 r₁ 0, r₂ 3
- p₃의 할당 자원 r₁ 4 ,r₂ 1, 요구 자원 r₁ 2, r₂ 9
- r₁ 의 가용 가능 자원 3, r₂ 의 가용 가능 자원 3
- 새로운 변수 WORK 에 현재 상태에서 가용할 수 있는 자원 AVAIL 값 복사
- 자원 할당 받은 프로세스의 FINISH 값 false로 설정
- 프로세스가 종료되지 않았다는 의미 3. WORK 값을 할당 해 NEED 값을 할당 할 수 있는 프로세스 체크
- p₂한테 자원 할당 후 p₂가 종료 된 후 반환 된 1, 5 값 WORK 값에 추가 4. WORK 값 4, 8을 이용해 NEED 값 할당 할 수 있는 프로세스 체크
- p₁한테 자원 할당 후 p₁가 종료 된 후 반환 된 0, 2 값 WORK 값에 추가 5. WORK 값 4, 10을 이용해 NEED 값 할당 할 수 있는 프로세스 체크
- p₃한테 자원 할당 후 p₃가 종료 된 후 반환 된 4, 1 값 WORK 값에 추가 6. 모든 프로세스 상태 FINISH = true 이므로 교착 상태가 아님을 판단함
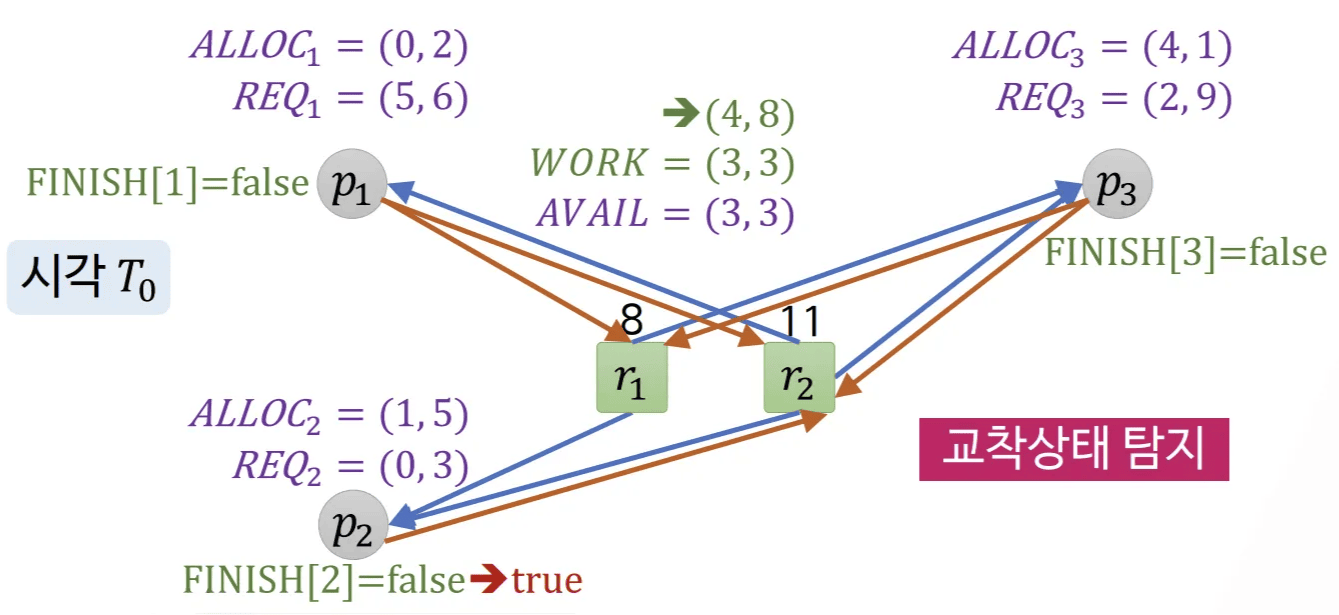
- p₁의 할당 자원 r₁ 0 ,r₂ 2, 요구 자원 r₁ 5, r₂ 6
- p₂의 할당 자원 r₁ 1 ,r₂ 5, 요구 자원 r₁ 0, r₂ 3
- p₃의 할당 자원 r₁ 4 ,r₂ 1, 요구 자원 r₁ 2, r₂ 9
- r₁ 의 가용 가능 자원 3, r₂ 의 가용 가능 자원 3
- 새로운 변수 WORK 에 현재 상태에서 가용할 수 있는 자원 AVAIL 값 복사
- 자원 할당 받은 프로세스의 FINISH 값 false로 설정
- 프로세스가 종료되지 않았다는 의미 3. WORK 값을 할당 해 NEED 값을 할당 할 수 있는 프로세스 체크
- p₂한테 자원 할당 후 p₂가 종료 된 후 반환 된 1, 5 값 WORK 값에 추가 4. WORK 값 4, 8을 이용해 NEED 값 할당 할 수 있는 프로세스 체크
- 할당 할 수 있는 프로세스 존재 하지 않음 → 교착 상태로 판단 5. FINISH 값이 false로 남아있는 프로세스에 대해 복구 작업 진행
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
boolean detect(상태 데이터) { WORK = AVAIL; if ( ALLOCᵢ != 0) FINISH[i] = false; else FINISH[i] = true; (i = 1, 2, ..., n) for ( l = 1; l <= n; l++ ) { for(i=1; i<=n; i++) if(FINISH[i]==false && REQᵢ <= WORK ) { WORK = WORK + ALLOCᵢ ; FINISH[i] = true; break; } if (i > n) break; } if ( FINISH[i] == false인 i 존재) return true; else return false; }
- 시간 복잡도 O(mn²)
- m: 자원 종류
- n: 프로세스 수
- 알고리즘 수행 시점
- 즉시 받아들일 수 없는 자원 요구가 있을 때
- 정해진 시간 간격
- CPU 효율이 일정 수준 이하로 떨어질 때
교착 상태 복구
- 교착 상태가 탐지 되면 복구 조치
- 복구의 주체
- 오퍼레이터
- 수작업으로 복구
- 운영체제
- 자동으로 복구
- 오퍼레이터
- 복구 방법
- 교착 상태 프로세스를 종료
- 교착 상태 프로세스가 할당 받은 자원을 해제
- 교착 상태 프로세스를 종료
- 모든 교착 상태 프로세스를 종료
- 단점 : 진행했던 내용에 대한 복원 비용 큼
- 사이클이 제거될 때까지 교착 상태 프로세스를 하나씩 종료
- 단점 : 종료 대상을 선택하기 위한 비용, 매 프로세스 종료 후 교착 상태 재 확인을 위한 비용
- 모든 교착 상태 프로세스를 종료
- 교착 상태 프로세스가 할당 받은 자원을 해제
- 사이클이 제거될 때까지 할당 된 자원을 단계적으로 선점하여 다른 프로세스들에 할당
- 프로세스와 자원 선택 기준
- 프로세스 진척도, 사용 중인 자원의 수 등
- 프로세스의 복귀 시점도 제반 요소를 고려하여 결정
- 기아 상태에 빠지지 않도록 프로세스 선택 시 복구 횟수 고려
정리 하기
- 교착 상태 회피는 프로세스의 자원 사용에 대한 사전 정보를 활용하여 교착 상태가 발생할 수 있는 불 안전 상태가 되는 것을 피하는 방법임
- 변형된 자원 할당 그래프에서 요구 간선을 할당 간선으로 바꾸어도 사이클이 생기지 않는 안전 상태일 경우에만 자원 요구를 수용함
- 은행원 알고리즘은 프로세스가 요구한 자원을 할당해 줄 경우에도 안전 순서 열이 존재하는지 검사하여 자원 요구의 수용 여부를 결정함
- 교착 상태 탐지 및 복구는 교착 상태가 발생 했는 가를 탐지한 후, 희생자를 선택하여 해당 프로세스를 중지 시키거나 자원을 선점하는 방법임
- 교착 상태 탐지 알고리즘은 현재 상태의 모든 자원 요구 량을 고려하여 교착 상태 여부를 확인함